

3月26日-27日,第二届焉知人形机器人大会在上海盛大启幕。本次大会聚焦人形机器人技术前沿与产业落地,汇聚行业顶尖科研机构、产业链龙头企业与资深专家,共话行业发展新机遇。

作为灵巧手工业场景解决方案提供商与落地领跑者,中科灵犀受邀出席本次盛会,公司联合创始人、副总经理胡鹄登台带来《工业智造新范式:灵巧手在柔性生产中的应用》主题演讲,深度分享具身智能机器人在工业场景中的创新应用与落地成果,为制造业柔性化升级提供全新解决方案。

直击行业痛点
破解柔性生产核心瓶颈
胡鹄副总经理在演讲中直指行业核心发展困境:传统工业夹爪虽在规模化产线广泛应用,但在柔性操作、环境感知、多任务切换上存在先天瓶颈,刚性、预编程的自动化范式,已无法适配制造业小批量、多品种、高混流的柔性生产需求。而从传统夹爪到仿生灵巧手的迭代,正是突破这一瓶颈的核心路径。

他表示,工业场景对末端执行器的需求,早已从简单夹持升级为精细化、自适应的灵巧操作。无论是10kV配网配电柜的高精度运维、化工场景的危险品取样,还是产线非标件的无序抓取、易损品的柔性分拣,都对执行末端的自由度、力控精度、环境适应性提出了极高要求,而这正是中科灵犀技术研发与方案落地的核心锚点。
全栈技术筑基
构建灵巧操作核心能力
依托中国科学技术大学的尖端技术积累,与上市企业江苏雷利的产业链支撑,中科灵犀实现了“机械+硬件+算法”全链路技术的深度整合,构建驱动、传动、感知、算法四大核心模块,打造出行业领先的灵巧操作技术体系。
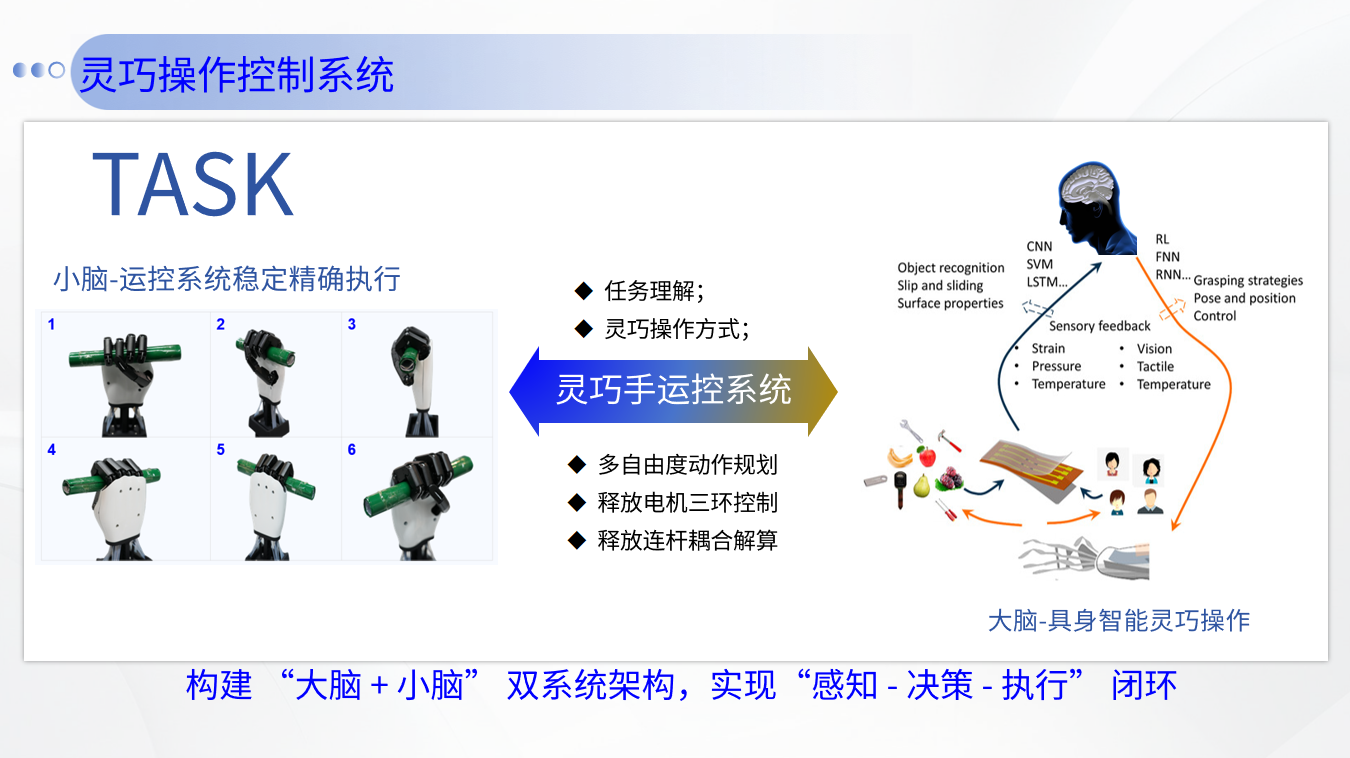
胡鹄副总经理在演讲中重点介绍了中科灵犀独创的“大脑+小脑”双系统控制架构:“大脑”负责任务理解、抓取策略规划与多模态环境感知,“小脑”负责运控系统的稳定精确执行,通过视觉、力觉、触觉多传感器融合与自研智能算法,实现自适应动态规划,让灵巧手完成人手级的精细化操作。
目前,中科灵犀已形成覆盖连杆式、绳驱式灵巧手的完整产品矩阵,是行业内少数同时掌握两大技术路线、可实现核心部件国产化批量生产的企业。产品具备16+自由度与0.01N级力控能力,可适配复杂工业场景下的多样化操作需求。
场景深度落地
解锁工业智造全新可能
技术的价值,最终要靠场景落地来验证。演讲现场,胡鹄副总经理展示了中科灵犀在多个工业领域的成熟落地案例,引发与会嘉宾的高度关注与热烈讨论。
在电机装配领域,中科灵犀为江苏雷利小微电机厂打造的电机抓取与线束整理系统,基于“手-眼-臂-脑”闭环控制架构,可在10秒内稳定完成全流程作业,有效解决了人工操作效率低、质量不稳定的行业痛点;
工厂电机抓取
在化工安全生产领域,为某国有化工厂定制的智能取样机器人,可自主完成样品抓取、转运、送检全流程,实现高危场景无人化值守;
智能取样机器人
在矿山运维领域,为选煤厂打造的皮带输运保护系统,破解了恶劣环境下设备巡检难度大的行业难题,为矿山安全生产保驾护航。
矿山皮带输运保护系统
除此之外,中科灵犀的解决方案还已广泛应用于精密零部件检测、新能源充电站作业、配电柜巡检等多个工业场景,形成了可复制、可推广的标准化落地模式。

作为行业内少数兼具连杆与绳驱双技术路线、可实现核心部件国产化批量生产的企业,中科灵犀始终以工业场景落地为核心。未来,公司将持续深耕具身智能灵巧操作技术,不断拓宽应用边界,推动人形机器人核心部件与解决方案的规模化普及,为新型工业化发展持续赋能,助力中国制造业智能化、柔性化转型升级。


